
 |
ProjetoDoRobôSentinela2013ProgramaDePré-IC2013.ProjetoDoRobôSentinela2013 HistoryHide minor edits - Show changes to markup Changed lines 35-36 from:
to:
 Fonte de alimentação externa com três pilhas de 1.5 volts Changed lines 22-23 from:
to:
 Sensor espacial a laser (Hokuyo)\\ Added lines 28-29:
 Changed lines 9-10 from:
to:
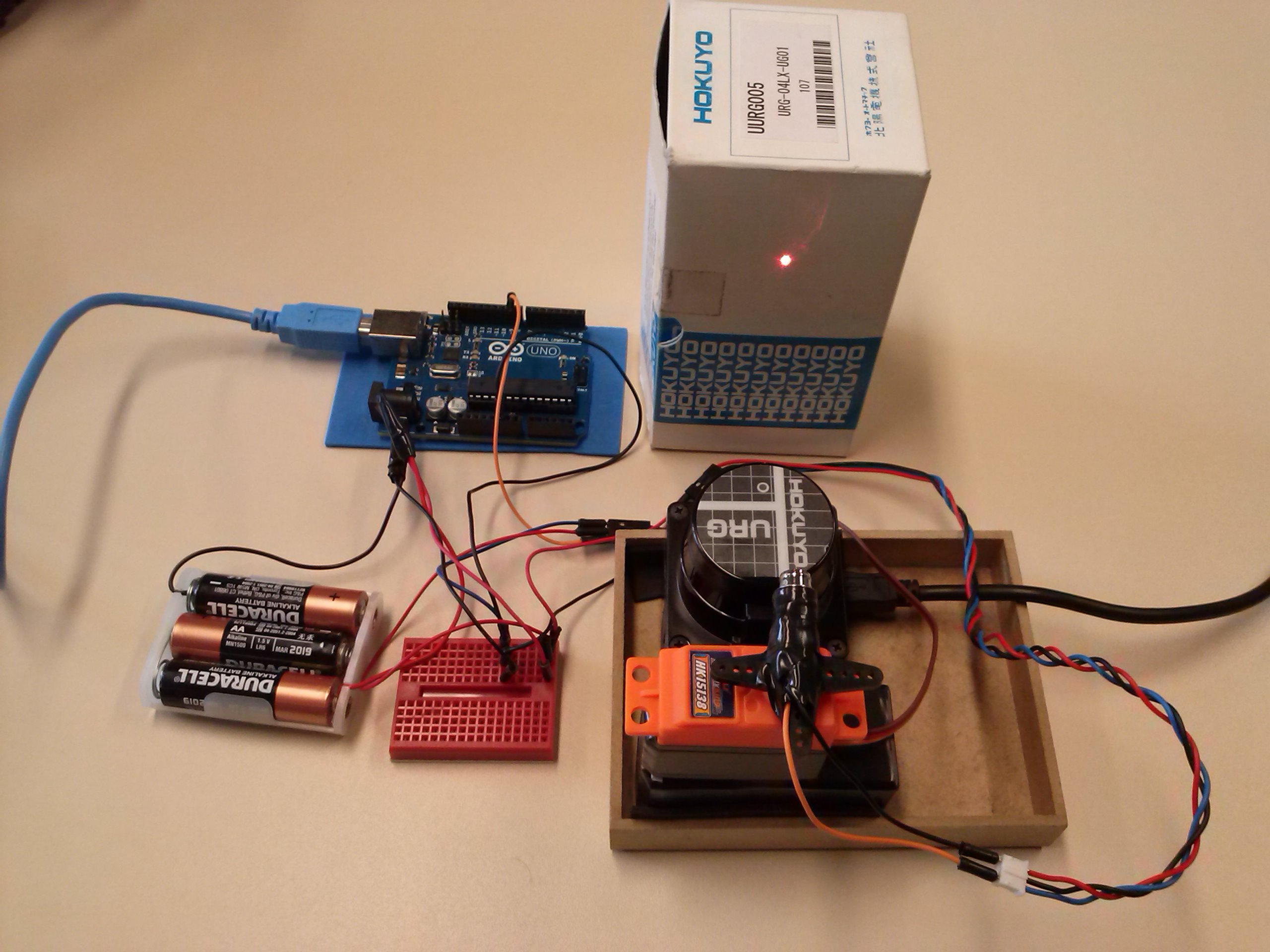 Sistema completo Changed line 19 from:
to:
 Changed line 30 from:
Fonte de Alimentação externa''': Com três pilhas alcalinas de 1.5 volts, nós utilizamos uma fonte de alimentação externa devido a problemas de comunicação SERIAL da placa de arduino com as versões anteriores do projeto, já que a alimentação vinda da placa parecia causar interferência nesta comunicação. to:
Fonte de Alimentação externa''': Com três pilhas alcalinas de 1.5 volts, nós utilizamos uma fonte de alimentação externa devido a problemas de comunicação SERIAL da placa de arduino com as versões anteriores do projeto, já que a alimentação vinda da placa parecia causar interferência nesta comunicação.\\ Changed line 20 from:
Hokuyo: Primeiramente faz um "mapeamento" inicial do ambiente e envia os dados para um computador de modo que qualquer novo objeto a aparecer em seu "campo de visão" passa a ser visto como alvo do sistema. O computador então faz um cálculo do ponto médio do alvo e manda um valor angular para a placa de Arduino; to:
Hokuyo: Primeiramente faz um "mapeamento" inicial do ambiente e envia os dados para um computador de modo que qualquer novo objeto a aparecer em seu "campo de visão" passa a ser visto como alvo do sistema. O computador então faz um cálculo do ponto médio do alvo e manda um valor angular para a placa de Arduino;\\ Changed line 1 from:
'+LABORATÓRIO DE ROBÓTICA MÓVEL - LRM / ICMC / USP to:
'+LABORATÓRIO DE ROBÓTICA MÓVEL - LRM / ICMC / USP\\ Changed line 21 from:
to:
Added lines 1-31:
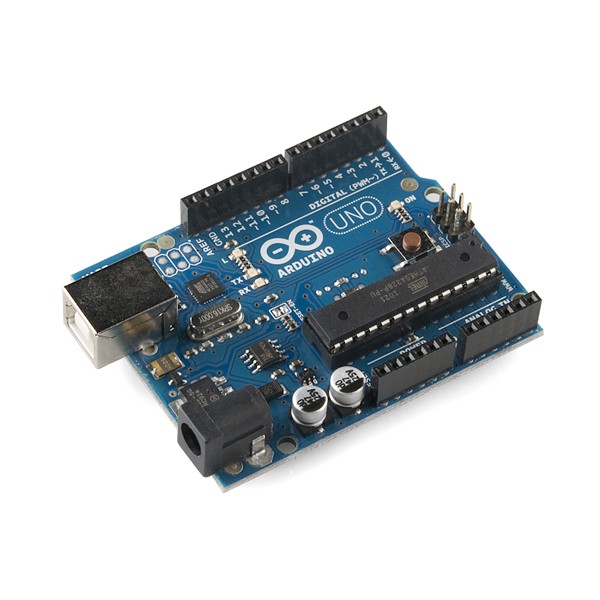
'+LABORATÓRIO DE ROBÓTICA MÓVEL - LRM / ICMC / USP Projeto do Robô Sentinela+' OBJETIVO Ao produzir o Robô Sentinela visávamos demonstrar o uso de componentes presentes na robótica (como motores, sensores e controladores) utilizando esses componentes no desenvolvimento de um projeto criativo explorando as inúmeras possibilidades desta área. Sistema completo DESCRIÇÃO Utilizamos para a realização do projeto "Robô Sentinela" uma placa de Arduino, um sensor de reconhecimento espacial a laser (Hokuyo), um motor (SERVO Simples), um laser-pointer (laser comum) e uma fonte de alimentação externa. Placa de ARDUINO: É um micro controlador que funciona como o "cérebro" do sistema, determinando a ação realizada por cada um dos outros componentes, envia os valores angulares recebidos pelo Hokuyo para serem reproduzidos pelo motor; Placa de arduino Hokuyo: Primeiramente faz um "mapeamento" inicial do ambiente e envia os dados para um computador de modo que qualquer novo objeto a aparecer em seu "campo de visão" passa a ser visto como alvo do sistema. O computador então faz um cálculo do ponto médio do alvo e manda um valor angular para a placa de Arduino; Sensor espacial a laser (Hokuyo) Mais informações no site: http://www.hokuyo-aut.jp/02sensor/07scanner/urg_04lx_ug01.html Laser-Pointer acoplado ao motor SERVO simples (na cor laranja) SERVO Simples: Após receber os valores da placa de Arduino, gira em direção ao ponto médio recebido. Laser-Pointer: Estando acoplado ao SERVO, sua função é a de nos fornecer uma indicação visual de onde o motor está apontando, para que possamos assim comprovar que o sistema de fato aponta para o alvo. ''' Fonte de Alimentação externa''': Com três pilhas alcalinas de 1.5 volts, nós utilizamos uma fonte de alimentação externa devido a problemas de comunicação SERIAL da placa de arduino com as versões anteriores do projeto, já que a alimentação vinda da placa parecia causar interferência nesta comunicação. Fonte de alimentação externa com três pilhas de 1.5 volts |