|
ProjetoDoLRMino132013ProgramaDePré-IC2013.ProjetoDoLRMino132013 HistoryHide minor edits - Show changes to markup Changed lines 37-38 from:
 to:
Changed lines 44-45 from:
 to:
Changed line 51 from:
 to:
Changed lines 36-37 from:
to:
Changed lines 39-40 from:
to:
 Added lines 43-44:
Added line 50:
Changed lines 35-36 from:
e se a distância for ainda menor que 20cm ambos os motores começam a funcionar ao contrário fazendo com que o robô dê ré); to:
Changed lines 35-36 from:
40 e 20cm um deles, escolhido aleatoriamente, deve parar de funcionar por determinado tempo fazendo com que o robô vire; to:
Deleted line 0:
Changed lines 35-36 from:
O Arduino recebe as distâncias medidas pelo sonar (sensor) e dependendo da distância recebida (medida em centímetros) ele toma uma certa decisão (se a distância for maior que 40cm os motores SERVO continuam funcionando "pra frente"; se a distância for entre to:
Deleted line 1:
Changed lines 36-41 from:
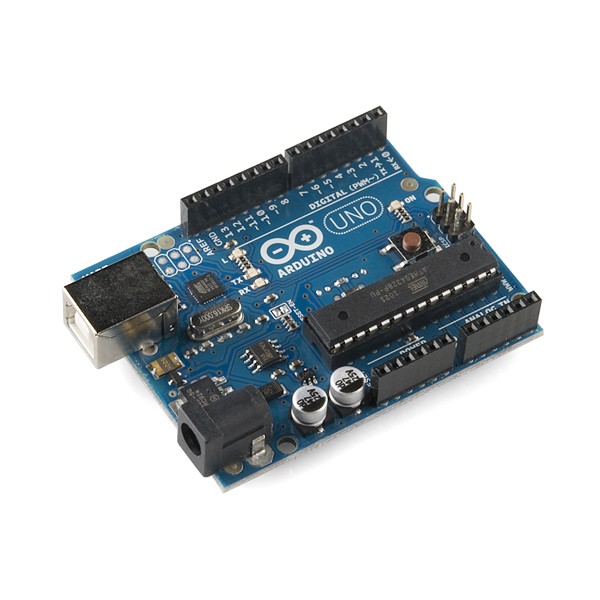
Placa de ARDUINO: Micro controlador que funciona como o "cérebro" do sistema, determinando a ação realizada por cada um dos outros componentes a ele conectado. O Arduino recebe as distâncias medidas pelo sonar (sensor) e dependendo da distância recebida (medida em centímetros) ele toma uma certa decisão (se a distância for maior que 40cm os motores SERVO continuam funcionando "pra frente"; se a distância for entre 40 e 20cm um deles, escolhido aleatoriamente, deve parar de funcionar por determinado tempo fazendo com que o robô vire; to:
O Arduino recebe as distâncias medidas pelo sonar (sensor) e dependendo da distância recebida (medida em centímetros) ele toma uma certa decisão (se a distância for maior que 40cm os motores SERVO continuam funcionando "pra frente"; se a distância for entre 40 e 20cm um deles, escolhido aleatoriamente, deve parar de funcionar por determinado tempo fazendo com que o robô vire; Added lines 1-53:
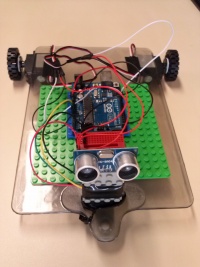
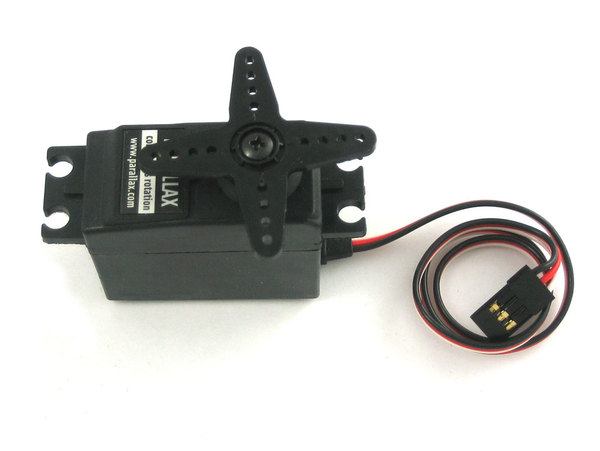
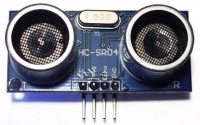
LABORATÓRIO DE ROBÓTICA MÓVEL - LRM / ICMC / USPProjeto do Robô Móvel LRMino13, o robô móvel OBJETIVO Desenvolver um robô móvel utilizando de sensores e atuadores, controlados por um Arduino. Ao desenvolver este projeto (apelidado de "LRMino13"), foi possível demonstrar o uso de elementos da robótica (como sensores, motores e controladores) resultando em um projeto bastante divertido e funcional explorando as diversas possibilidades que estas tecnologias dispõem. DESCRIÇÃO O projeto do robô é composto por uma placa de ARDUINO, um sonar (sensor), dois motores (SERVO Contínuo) e duas fontes de alimentação (pilhas e bateria). Placa de ARDUINO: Micro controlador que funciona como o "cérebro" do sistema, determinando a ação realizada por cada um dos outros componentes a ele conectado. O Arduino recebe as distâncias medidas pelo sonar (sensor) e dependendo da distância recebida (medida em centímetros) ele toma uma certa decisão (se a distância for maior que 40cm os motores SERVO continuam funcionando "pra frente"; se a distância for entre 40 e 20cm um deles, escolhido aleatoriamente, deve parar de funcionar por determinado tempo fazendo com que o robô vire; e se a distância for ainda menor que 20cm ambos os motores começam a funcionar ao contrário fazendo com que o robô dê ré);
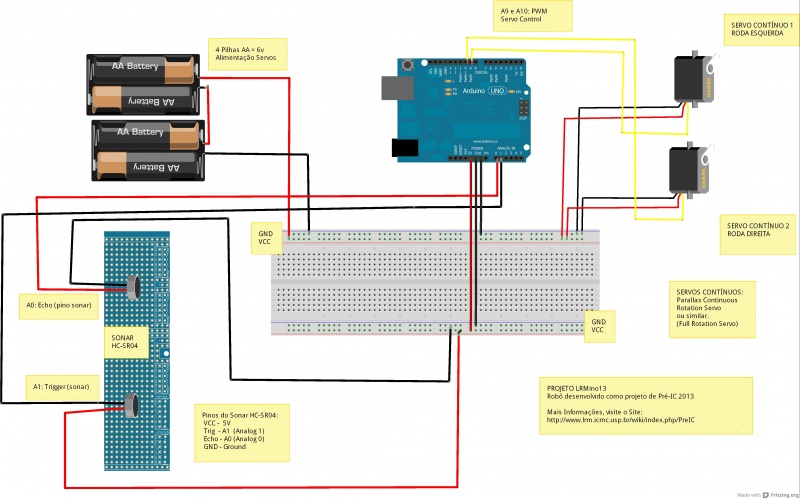
Esquema do Projeto |