+ LABORATÓRIO DE ROBÓTICA MÓVEL - LRM / ICMC / USP Projeto do Braço Robótico+
OBJETIVO
Ao produzir o braço mecânico automático tínhamos como objetivo demonstrar o uso de componentes presentes na robótica (como motores, sensores e controladores) visando desenvolver um projeto criativo explorando as inúmeras possibilidades desta área.
DESCRIÇÃO
O projeto do braço mecânico é constituído por uma placa de ARDUINO, dois potenciômetros, e dois motores(SERVO Simples).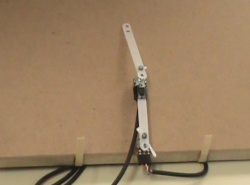
Braço Matriz
Braço Mecânico
Placa de ARDUINO: É um micro controlador que funciona como o "cérebro" do sistema, determinando a ação realizada por cada um dos outros componentes, converter os valores dados por cada um dos potenciômetros em valores angulares a serem "copiados" pelos motores;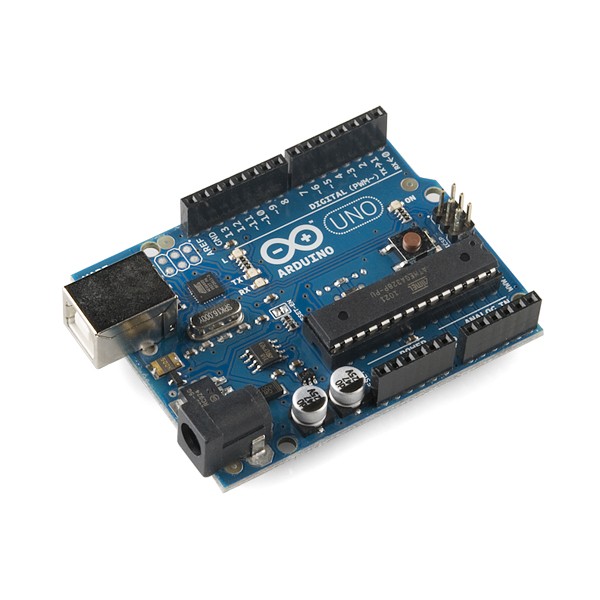
Potenciômetros: São os sensores do sistema, cada um funciona independentemente no braço matriz enviando valores para a placa que devem ser copiados pelos motores;


SERVO Simples: São as juntas do braço mecânico (subordinado). Cada motor deve "imitar" o movimento do potenciômetro correspondente no braço matriz.


''' OU SEJA'''
O sistema é correspondido por dois braços: o braço matriz e o braço mecânico. O braço mecânico deve realizar os mesmos movimentos feitos pelo braço matriz através de seus motores que copiam os movimentos dos potenciômetros.